There exists a mathematically different approach to describing classical mechanics than what is usually taught. While it is usually taught using laws like , conservation of energy, and conservation of momentum, there exists a more mathematically elegant and, in some sense, more fundamental way of describing the motion of objects known as Lagrangian mechanics. It is used throughout engineering and physics to solve problems that are too complicated or impractical to solve using classical methods.
In Lagrangian mechanics, there exists a property of objects called the Lagrangian which is defined as .
and
represent kinetic and potential energy respectively. The Lagrangian should not be confused with total energy which is the summation of these two concepts, not the difference. At any point in space or time, an object has some Lagrangian. The idea is that the path that an object takes from one point to another is unknown (the assumption is made that there is no knowledge of
, conservation of energy, or conservation of momentum). For example, assume it is known that a ball starts at
at time
and ends at
at time
. The figure below shows a few possible paths it could take.
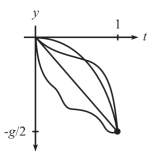
In reality, they actually all occur in a superposition of states but one path is significantly more likely than the others. Lagrangian mechanics mathematically determines which path is the most likely. This is done through the consideration of 2 more quantities: action or and phase. Every path has an action which is defined below.
This integral would basically sum the time-dependent Lagrangian over any path. The phase of any path is (if you don’t know about equations of the form
, check out this quick post). The probability of a particle to go from one point to another is determined by adding up all the phases of all possible paths from the initial to the final point and then taking its absolute value squared.
The sum of all possible paths and integrating action over each one however is unrealistic. There is a way to deduce which will have the largest probability. If each possible path differs even slightly in action, the exponent in the phase term will increase to an arbitrarily large number because its denominator, Planck’s constant, is on the order of . Because
is a complex sinusoidal function, increasing
practically yields a random number with magnitude less than
for (one cannot estimate
with accuracy thus it is practically arbitrary). This means the summation of all possible phases will be the summation of a very large amount of random numbers which would sum to zero.
However, assume the final point is at a point where the actions for its paths are minimized. At local minima, all the points near the minimum are practically the same by definition because the slope is 0. This means all paths will have similar actions resulting in a nonzero summation. A nonzero summation yields a nonzero probability and because every other point yields a probability so close to zero, this is the path that occurs. The most probable path is the path of least action and this idea is called the Principle of Least Action (sometimes called Principle of Stationary Action because it need not be an absolute minimum, only local).
Now we have to find a way to calculate this path. The Euler-Lagrange equations do just that. It is shown below.
In order to show that it works, below is the work for the simple dropping of a ball.
In this case, it reduced to the basic Newton’s Third Law equation that everyone knows but it can prove very useful in more complex cases. Note: there was no consideration of conservation of energy or force. The only knowledge that was known was kinetic and potential energy as a function of position and velocity. After this point, it is just the solution of one differential equation which shows the power and beauty of this form of mechanics. In fact, the variable being differentiated with respect to need not be . It can be done in any coordinate basis (one can replace it with
,
, etc.).
Not only this but Noether’s theorem tells us that for each symmetry of the equation, there exists some conservation. One can show that when using this, we can prove the conservation of energy, momentum, and angular momentum but these proofs will be left out for now due to their complexity.
If you want to learn more or see where I got it from, read the book “Introduction to Classical Mechanics” by David Morin (it has the conservation proofs). It should be in the “Books” page of the site.

Leave a comment