It has admittedly been quite a while since my last post over a year ago. I thought I would restart the posts by revisiting one of the first topics I discussed on the website: quaternions. My previous post, upon review, seems to be quite uninformative on what the nature and use of them are which I will attempt to show in this post.
Formalism
Quaternions are a generalization of complex numbers (


where


Now, there are 3 “imaginary” components and they are defined by that relation at the bottom. This is super interesting! What does this even mean though? A real number with some sort of 3-dimensional imaginary component?
Let’s first look at the algebra of this new type of number by investigating the results of that relation. Assuming real number multiplication follows the expected properties and associativity, observe the following identities that form out of the algebra defined above.






Note that this algebra eerily resembles the cross product (🤔) which means its also not commutative. This makes algebra complicated. Look at how two quaternions multiply using these rules.




Ew. This definitely calls for more friendly notation. We adopt the following.
Let 







Quaternion multiplication can then be simplified immensely but considering the fact that 

Distribute.

Apply known rules.

Combine.

Compare this with complex number multiplication.


They are very similar. (Note: In the future, we will define 

I leave it to the reader to convince themselves that the following definitions of the conjugate and norm for


Euler’s formula for complex numbers also extends to quaternions which will come in use later.


Showing this works requires a lot more math than we have space for. The Pauli matrix formulation1 however makes it fairly straightforward with matrix exponentials.
Application
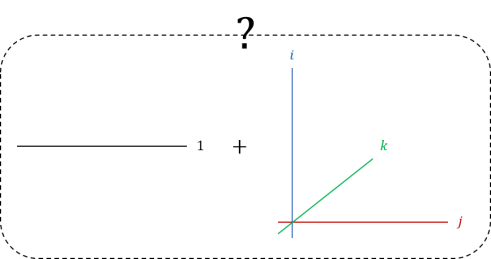
These hypercomplex numbers are remarkably applicable. Say we wish to rotate a vector 





All our rotation information is encoded in the rotation quaternion 



The desired vector is obtained by taking 




It is equivalent to applying the singular rotation 
Allow me to convince you of this with a very familiar case of 3D rotations. Let our axis be 




Apply the formula.




This is exactly our desired result. Amazing!
This amazing simplification of 3D rotations alone makes quaternions extremely useful in physics and computer graphics. It also has an interesting position in algebra as a ring but that extends into a much different topic.
Extension
Naturally, one might ask the question why not add more imaginary components? Or why did we jump from 1 to 3? Why don’t we just consider a general n-component case? This is where algebraic theory becomes important.
Cayley-Dickson Construction and hyperhyperhypercomplex numbers
There are a variety of directions one can go when constructing hypercomplex numbers but I chose a very popular and desirable one: quaternions. They are the result of Cayley-Dickson construction.
Cayley-Dickson construction takes an algebra or vector space over the real numbers in 

Take an algebra over the reals 




Some notes:
- Order is very important here!
- The norm is universally defined as
and it always yields a non-negative real number (check for yourself)
- Things like the identity and distributivity are passed down in a trivial manner as well.
Now let’s apply this construction.
We start with 



From these properties, it is clear that 




See if you can convince yourself that 


From this point on, the exercise becomes fairly robotic but there is one noteworthy point. We lose algebraic convenience with each construction. Note the following convenient algebraic properties. The fields in parentheses are the different levels of the Cayley-Dickson constructions that have them.
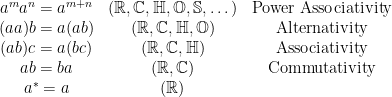


Remember that distributivity is not mentioned because it is more about relation addition and multiplication than describing multiplication.
In fact, there is a more general Cayley-Dickson construction but I think this is a good stop pointing in the discussion of theory. Now to another basic question.
Why not 2 imaginary components, or 4? Why must it be 
I am not gonna sketch out full general reasoning why but I will provide an example that may allow you to intuit why only these dimensions are notable. Assume there existed an algebra of numbers 


1. 
Then just call it 
2. 
Then 
3. 
Then 
4. 
You get it by now … 
5. 

No matter how we define the product, it basically reduces to complex numbers or quaternions. The same will happen for higher dimensions which is why the hypercomplex algebras only have meaning for dimensions of the form
From here, if you wish to learn more, try looking into more forms of the Cayley-Dickson construction like split-complex numbers, split-quaternions, etc. but this itself I am sure was enough to digest. Have fun exploring!
1 A quaternion 









Leave a comment